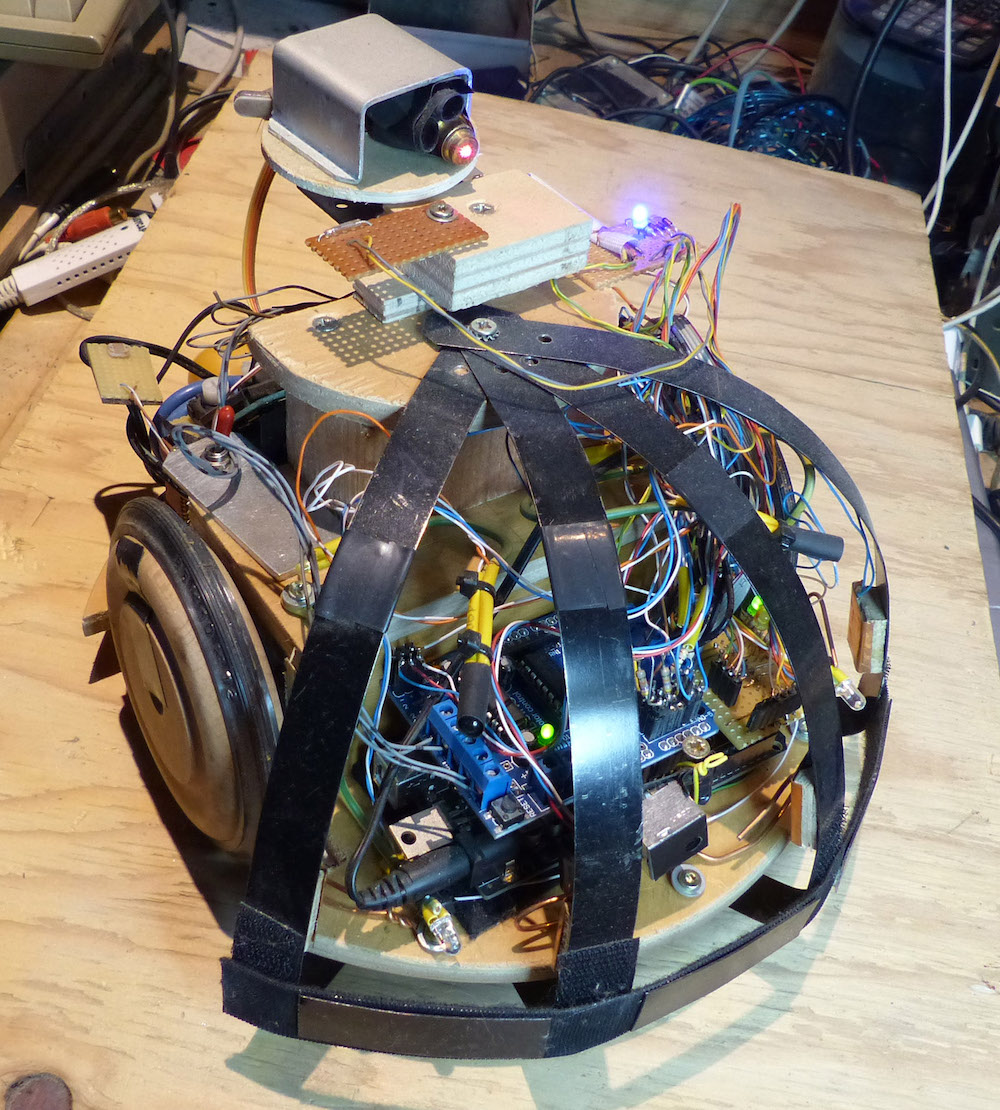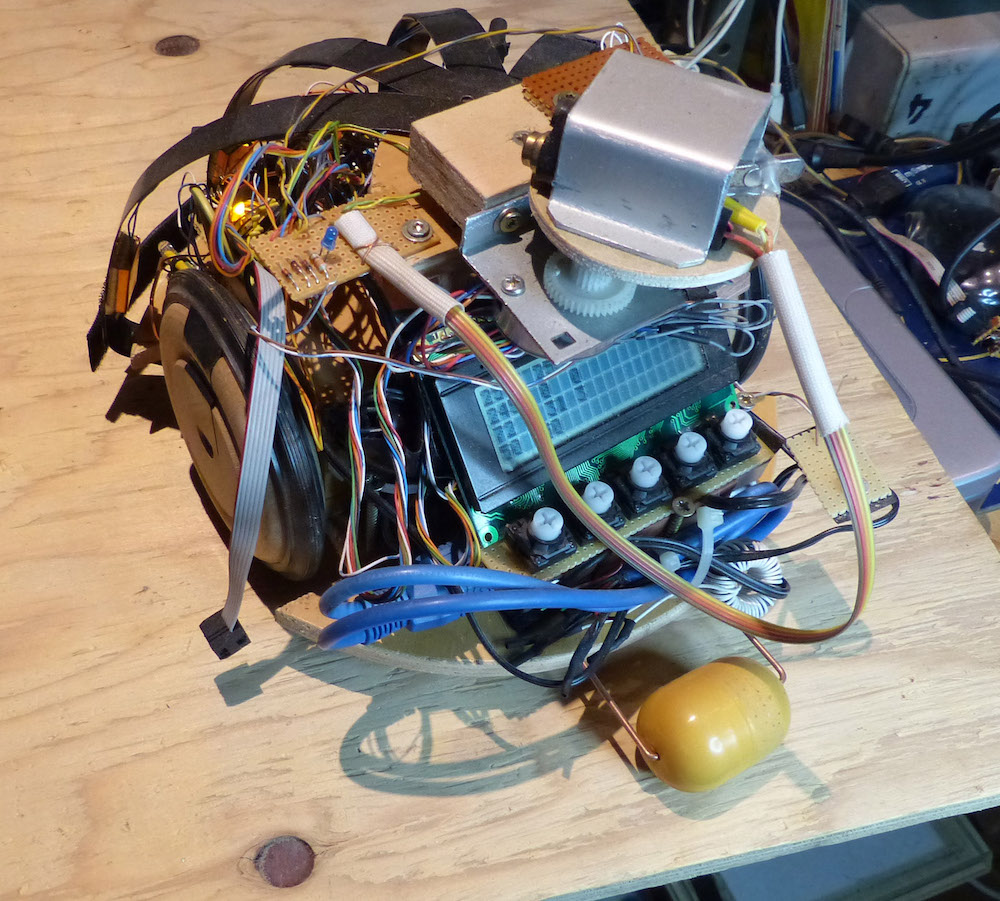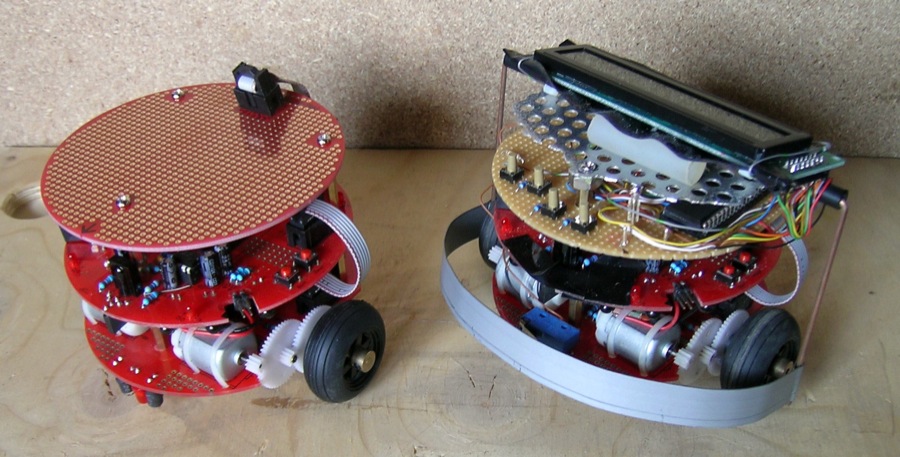
Ziel des Projekts: 2 Roboter sollen sich verfolgen. Einer soll abhauen, hin- und herfahren und sich schliesslich irgendwo verstecken. Der andere soll auf unterschiedliche Positionen fahren, und dort eine langsame Volldrehung machen, und mit einem Laser nach dem anderen suchen.
Der Gejagte hat auf seiner Rückseite einen Reflektor (Prismenreflektor wie beim Fahrrad). Dieses reflektiert beim Anvisieren mit dem Laser genau in Richtung des Lasers. Dort ist ein LDR, der den Strahl erkennt. Der Verfolger versucht, in die Nähe des Gejagten zu kommen. Dieser hat jedoch den Jäger anhand seines Lasers erkannt, und versucht, zu entkommen.
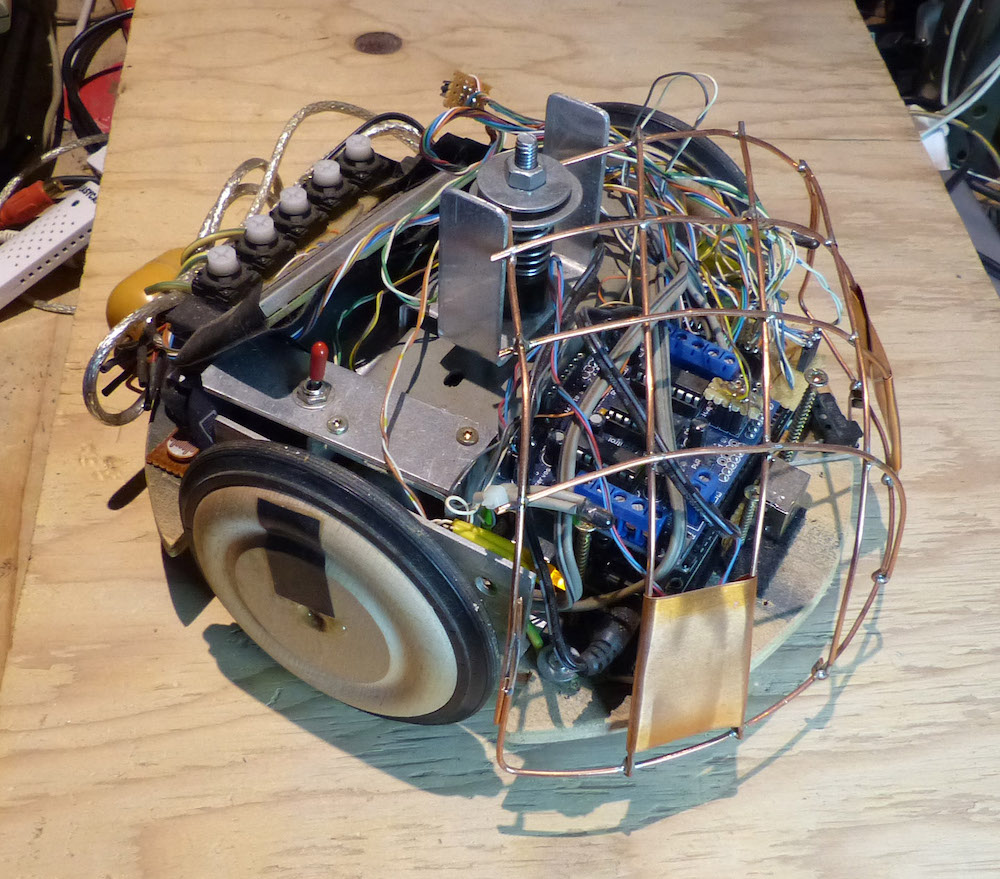
Es wurde nicht der originale Prozessor von Conrad benutzt.
Der Verfolger war schon recht weit fortgeschritten und konnte den Reflektor durchaus erkennen. Doch dann machte die sonst so sauber arbeitende IR-Hindernis-Erkennung immer mehr Schwierigkeiten, so dass das Projekt vorerst mal eine Weile ruht.... Ein weiteres Problem war das schlappe Drehmoment während des langsamen Drehens zum Scannen der Umgebung.